2)同步控制
上空設(shè)備除了保證單獨運行的精度,還應(yīng)滿足在載荷容許的情況下任意組合使用,并做到多套設(shè)備精確同步運行(見圖3)。通過保證加工安裝精度、設(shè)置增量及絕對值編碼器,運行定位精度可達到±2 mm,同步精度可達到±3 mm。采用分散控制定位技術(shù),由變頻器或軸控制器進行直接定位控制,可編程序控制器或計算機進行集中管理,有效解決電機的精確定位。同時,采用軟件同步調(diào)節(jié)算法,實現(xiàn)多設(shè)備間的同步協(xié)調(diào)運行。

旅游類劇場通常希望打破常規(guī)劇場的框架,實現(xiàn)大進深、寬視角、新穎獨特的多層次立體觀演舞臺。該類舞臺需要克服大規(guī)模大載荷舞臺設(shè)備帶來的結(jié)構(gòu)、動力、傳動、軌跡、控制、集成和協(xié)同等一系列相關(guān)技術(shù)問題。如深圳世界之窗的空間立體舞臺旋轉(zhuǎn)升降技術(shù)應(yīng)用。其舞臺建筑造型是橢圓球體, “地球”造型根據(jù)表演的需要,通過一系列開合、旋轉(zhuǎn)、升降及伸縮等60多種運動形式的關(guān)聯(lián)、協(xié)同和互鎖,向觀眾展示出現(xiàn)代化舞臺的理想表演空間,同時也創(chuàng)造出了一個從封閉的公園主題到敞開的廣場式露天藝術(shù)劇院。
為了實現(xiàn)舞臺大空間與環(huán)境轉(zhuǎn)換,需要有大型結(jié)構(gòu)和設(shè)備的運動變換,其平移開合不同的劇場有不同的要求。如無錫靈山梵宮劇場的大型結(jié)構(gòu)二維空間平移開合技術(shù),其劇場的圓形墻體是環(huán)形舞臺和圓形觀眾區(qū)的分界,墻體通過機電控制可實現(xiàn)沿圓弧軌道旋轉(zhuǎn)展開并沿水平方向前后移動。當8扇墻體圍合成封閉圓時,劇場形成供游客參觀的大殿。整個過程涉及到升降、平移與弧形運動、插銷定位等21個動作,綜合采用鏈條、齒條、摩擦等多種傳動技術(shù),實現(xiàn)水平移動與弧形運動的無縫轉(zhuǎn)換。機械墻體可展開270°,將圓形殿堂轉(zhuǎn)換為270°視角的圓形舞臺,如圖4所示。
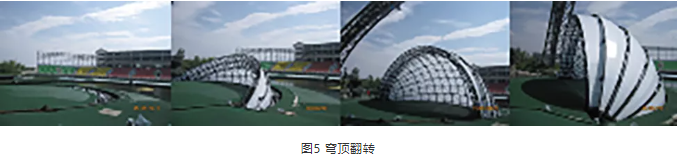
室外表演或?qū)嵕把莩鐾枰蟮奈枧_設(shè)備,提供與演出環(huán)境相適應(yīng)的大型表演舞臺,并根據(jù)演出內(nèi)容進行實時轉(zhuǎn)換。常規(guī)的平移、升降已無法滿足需求,需要平移、旋轉(zhuǎn)、傾斜、升降等運動形式的組合,實現(xiàn)大型舞臺場景的變化。如云南“希夷之大理”的旋轉(zhuǎn)升降組合穹頂翻轉(zhuǎn)技術(shù)的應(yīng)用。其主舞臺由旋轉(zhuǎn)相切的圓形組成,天棚穹頂是舞臺整體眼睛創(chuàng)意的眼珠,翻轉(zhuǎn)升起后可以作為投影幕使用。其中,五瓣穹頂既要相互分離,還要互相支持依靠,保證輕薄球面結(jié)構(gòu)的整體穩(wěn)定和變形控制,采用主次骨架結(jié)構(gòu)、同軸旋轉(zhuǎn)、液壓頂推、滾動支撐、分離掛鉤等方法,實現(xiàn)穹頂翻轉(zhuǎn),如圖5所示。采用同心軌道、多點浮動鏈輪驅(qū)動、虛擬圓心定位、電纜滑車供電、液壓系統(tǒng)隨動等方式,實現(xiàn)大型圓弧轉(zhuǎn)臺的360°旋轉(zhuǎn);采用自主液壓同步控制軟件,有效解決了不同液壓驅(qū)動設(shè)備的同步問題,穩(wěn)態(tài)同步控制精度小于5 mm。
在舞臺機械中采用的控制技術(shù)及其功能主要有以下幾種。
(1)多控制臺場景運行處理技術(shù)
利用多控制臺管理設(shè)備原則,解決多控制臺控制設(shè)備優(yōu)先級的問題;應(yīng)急場景控制的設(shè)備切入、切出功能,可加強舞臺實景演出設(shè)備人工操控的能力,達到理想演出效果。
(2)多種類系統(tǒng)冗余配置技術(shù)
針對整體控制方案和控制設(shè)備規(guī)模,開發(fā)軟件冗余、網(wǎng)絡(luò)完全冗余、異類冗余等不同的冗余方式,以滿足不同用戶的需求,實現(xiàn)對控制系統(tǒng)從重要局部到全局操控的總體把握,保證舞臺機械的集中管理和分散控制,且所有冗余控制方式對于用戶都是自動切換。
(3)多類型設(shè)備綁定同步技術(shù)
用于控制速度、距離等參數(shù)組合復(fù)雜的設(shè)備組的運行,避免操作失誤導(dǎo)致場景及設(shè)備碰撞或損壞等危險情況。這種綁定要求有較大的隨意性,同步的設(shè)備包括同類型或不同類型設(shè)備,設(shè)備速度及功率可能差別很大,同步位置要求可能相同或保持某一固定偏差,同步設(shè)定要求靈活,可以按要求設(shè)置同步組合,也可以解除同步狀態(tài),恢復(fù)單體運行。
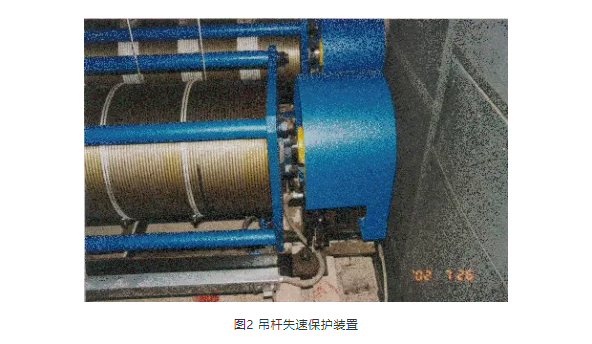
(4)多方位設(shè)備保護技術(shù)
獨立的失速保護檢測電路,通過失速檢測實現(xiàn)因設(shè)備失控而引發(fā)自由下落的安全防護功能;空間設(shè)備的互鎖、解鎖技術(shù),避免設(shè)備運行時發(fā)生相互碰撞的危險,保證劇場演出人員及設(shè)備的安全;利用現(xiàn)場總線網(wǎng)絡(luò)監(jiān)控及加強技術(shù),可對網(wǎng)絡(luò)通信故障引發(fā)的設(shè)備控制運行失效進行有效、準確排查;采用多種安全反饋,保證設(shè)備可靠運行。
(5)矩陣切換冗余技術(shù)
冗余控制矩陣切換技術(shù)針對臺上變頻調(diào)速設(shè)備,每一個設(shè)備受多個變頻器選通控制。出現(xiàn)問題的變頻器可由網(wǎng)絡(luò)掛接的其余變頻器接替工作,從而達到熱備效果。
(6)場景數(shù)據(jù)冗余備份和快速恢復(fù)技術(shù)
一鍵式設(shè)備位置恢復(fù)功能,備份設(shè)備狀態(tài)數(shù)據(jù),當舞臺控制系統(tǒng)出現(xiàn)故障時進行數(shù)據(jù)恢復(fù);具備場景運行控制模式,實現(xiàn)在沒有場景編程計算機參與時,獨立控制舞臺機械設(shè)備場景運行。
(7)便捷、高效的遠程維護和故障診斷技術(shù)
通過遠程聯(lián)網(wǎng)地址和現(xiàn)場舞臺控制系統(tǒng)網(wǎng)絡(luò)跨接,實現(xiàn)設(shè)備在線瀏覽;遠程維護和故障診斷技術(shù)采用包括遠程數(shù)據(jù)記錄及分析系統(tǒng)進行遠程終端控制軟件維護。通過舞臺遠程服務(wù)軟件,實現(xiàn)舞臺廠家技術(shù)人員和現(xiàn)場用戶之間的遠程協(xié)作功能。同時還應(yīng)具有專業(yè)的管理功能,可對遠程服務(wù)數(shù)據(jù)進行有效的管理和分析。
(8)人機交互的三維虛擬劇場系統(tǒng)
隨著技術(shù)發(fā)展,逐步具備應(yīng)用計算機技術(shù)生成逼真的劇場三維視覺效果的能力,可將編導(dǎo)或設(shè)計者“投射”到劇場中某個環(huán)境中,并操作、控制劇場設(shè)備,實現(xiàn)在對虛擬劇院空間中進行設(shè)備控制的體驗和交互。
PLC控制技術(shù)與軸控制器技術(shù)[4]
PLC控制技術(shù)一般采用主流自動化廠家研發(fā)的中大型PLC系統(tǒng)為主,如西門子、施耐德、AB、貝加萊等,基于PLC的方案多采用主控CPU加擴展模塊的方式來完成,一個系統(tǒng)中通常只采用一到兩個主站來作為主控。PLC更多通過集中控制系統(tǒng)架構(gòu)實現(xiàn)對設(shè)備的控制。
由于PLC可以結(jié)合伺服或變頻系統(tǒng)的運動控制功能,大大減輕了PLC的運算負擔,并且現(xiàn)在的PLC具備很大的I/O映射區(qū),因此,PLC可以控制上千臺的運動設(shè)備。對于大型舞臺系統(tǒng),這種PLC的方式非常適合。舞臺機械的軸控制器技術(shù)主要為一些專業(yè)做舞臺設(shè)備的公司所研發(fā),如瓦格納、SBS、BBH等。一個軸控制器通常可控制1~4個設(shè)備,一個完整的系統(tǒng)中有幾十上百個軸控制器,并通過高速總線進行互聯(lián)。軸控制器一般采用分散控制的系統(tǒng)架構(gòu)。
軸控制器有著較高精度、高動態(tài)性能的運動控制能力,在多軸插補的情況時尤為明顯,這是其非常大的一個優(yōu)勢。在高速總線的配合下,軸控制器的控制通過使用主控單元和擴展單元的方式可控制運動設(shè)備的數(shù)量在上百臺的數(shù)量級,因此,占用實時總線系統(tǒng)的資源也相對較多。
目前國內(nèi)廠家以PLC控制為主,國外廠家主推軸控制器技術(shù)。兩者是控制理念和系統(tǒng)架構(gòu)的區(qū)別,在穩(wěn)定性、可維護性、安全可靠性、定位精度、同步精度、適應(yīng)性等方面各有特點,對解決和處理舞臺機械的控制問題,兩種控制系統(tǒng)均能滿足舞臺機械使用、安全、精度需求,并不存在技術(shù)上的優(yōu)劣或差異。
隨著技術(shù)的發(fā)展,兩者會取長補短,功能特點逐漸融合接近。未來軸控制器技術(shù)主要向設(shè)備端擴展,對單體設(shè)備實施進一步精細化控制;PLC也可自帶軸控定位功能,完成單獨軸控器的定位及控制功能,實現(xiàn)通用性基礎(chǔ)上的專業(yè)性。
變頻驅(qū)動控制是通過電力半導(dǎo)體器件的通斷作用將工頻電源頻率換成另一頻率的電機控制裝置,一般用交直交方式實現(xiàn)。伺服驅(qū)動控制是通過閉環(huán)檢測實現(xiàn)對速度、位置、力矩等的精確控制,使被控物體的位置、方式、狀態(tài)等輸出被控量能夠跟隨輸入目標(或給定值)任意變化,伺服控制可以用來精確跟蹤或復(fù)現(xiàn)某個過程反饋系統(tǒng),又稱隨動控制。
其中,變頻器主要充當調(diào)節(jié)變頻電機、普通交流電機轉(zhuǎn)速的角色,實現(xiàn)對交流異步電機的軟啟動和變頻調(diào)速,提高運轉(zhuǎn)精度、改變功率因素等。伺服驅(qū)動器是按指令要求,對功率進行放大、變換與調(diào)控等處理,利用位移、速度、電流三環(huán)閉環(huán)控制,使驅(qū)動裝置輸出的力矩、速度、位置控制非常靈活方便。
變頻控制的核心元件變頻器,通常由整流單元、高容量電容、逆變器、控制器等組成。伺服控制的核心元件是閉環(huán)反饋元件、伺服驅(qū)動器、運動控制卡等。
變頻控制與伺服控制的過載能力不同,伺服過載可達3倍,變頻約1.5倍;兩者控制精度不同,根據(jù)編碼器精度決定,伺服理論上可達1 μm,但與機械系統(tǒng)精度有關(guān),變頻控制精度可達0.01 mm,與脈沖頻率和電機控制數(shù)量有關(guān);變頻控制屬于傳動控制領(lǐng)域,一般用于常規(guī)工業(yè)應(yīng)用,伺服控制屬于運動控制領(lǐng)域,用于高精度、高響應(yīng)、高性能場合;根據(jù)電機轉(zhuǎn)動慣量不同,伺服加減速性能在空載0~2 000轉(zhuǎn)時,所需時間一般<20 ms;變頻控制一般用于三相異步交流電機,伺服控制一般用于同步交流伺服電機。
所有電子/電氣/可編程(E/E/PE)設(shè)備,包括一些最精密的設(shè)備/系統(tǒng)都可能由各種原因產(chǎn)生故障。用來評定故障及其后果的方法,就是根據(jù)故障概率得出的安全完整性等級SIL(Safety Integrity Level),共分4個等級,SIL1至SIL4,SIL4為最高等級。對于舞臺機械設(shè)備,目前希望達到的安全完整性等級為SIL3[5]。
安全完整性等級(SIL)是一種評估、驗證和認證,主要涉及安全設(shè)備開發(fā)流程的文檔管理(FSM)評估,硬件可靠性計算和評估、軟件評估、環(huán)境試驗、EMC電磁兼容性測試等內(nèi)容。
需要指出的是,具有SIL認證的設(shè)備與設(shè)備使用過程的安全并不是直接劃等號的,即對于具備SIL3認證的舞臺機械設(shè)備,只能說明設(shè)備本身具備與SIL3規(guī)定相對應(yīng)的安全可靠性,由于劇場環(huán)境、使用人員等不確定因素造成的復(fù)雜性,舞臺機械的設(shè)備安全還有其使用過程諸多因素的考慮。



.png)

